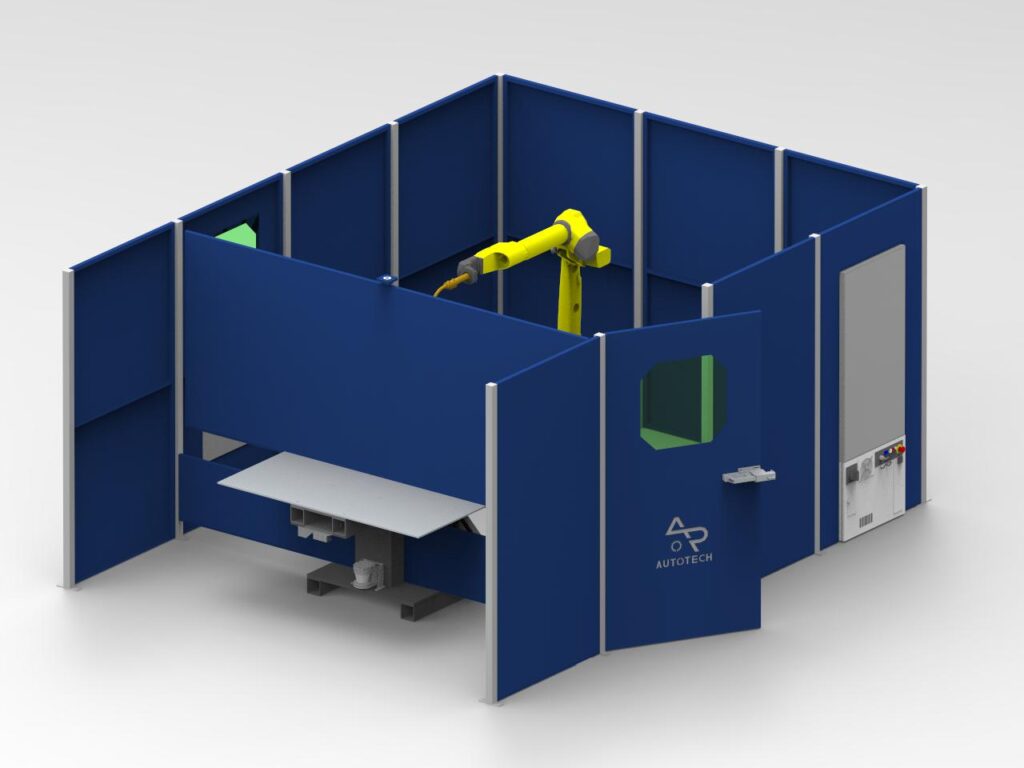
The Powered End Changer is designed to be a robust and hard-working solution for automated welding. The standard footprint is designed to be approximately the size of manual welding bay and provides a working area of 1500x750mm.
Easy To Use
Once initially programmed, the Powered End Changer’s automatic job recognition and quick-change fixturing allow for repeatable results on all workpieces, with minimal changeover time.
Safe
The Powered End Changer is fully guarded and interlocked to prevent operators interacting with the working robot or any arc welding.
Repeatable Quality
The Powered End Changer provides the same level of robotic welding as any of our welding systems. Robotic welding solutions provide unmatched repeatable weld quality when compared to any manual process.
Get In Touch
We would be delighted to assist you with any inquiries or provide further information. Please don’t hesitate to get in touch with our team:
We would be delighted to assist you with any inquiries or provide further information. Please don’t hesitate to get in touch with our team: